硬件
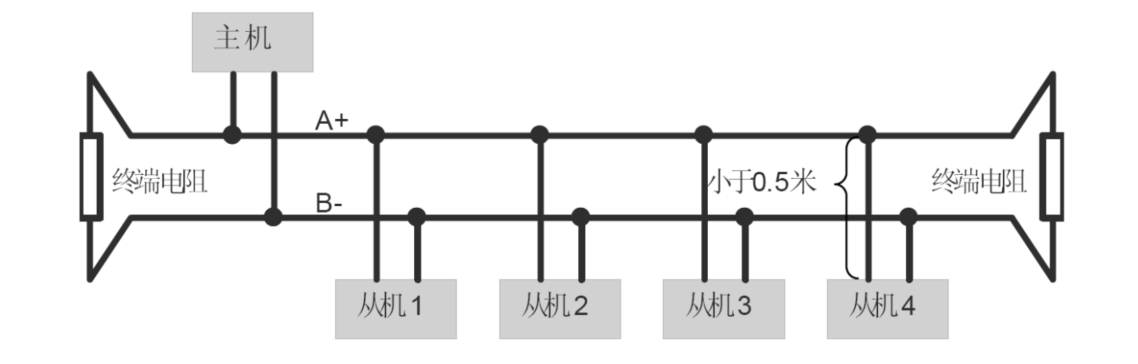
网络拓扑
RS485主从机通信网络拓扑图如下

控制器
SOC MPU或者MCU端必须集成UART控制器:UART_RXD && UART_TXD或者SCI_RXD && SCI_TXD
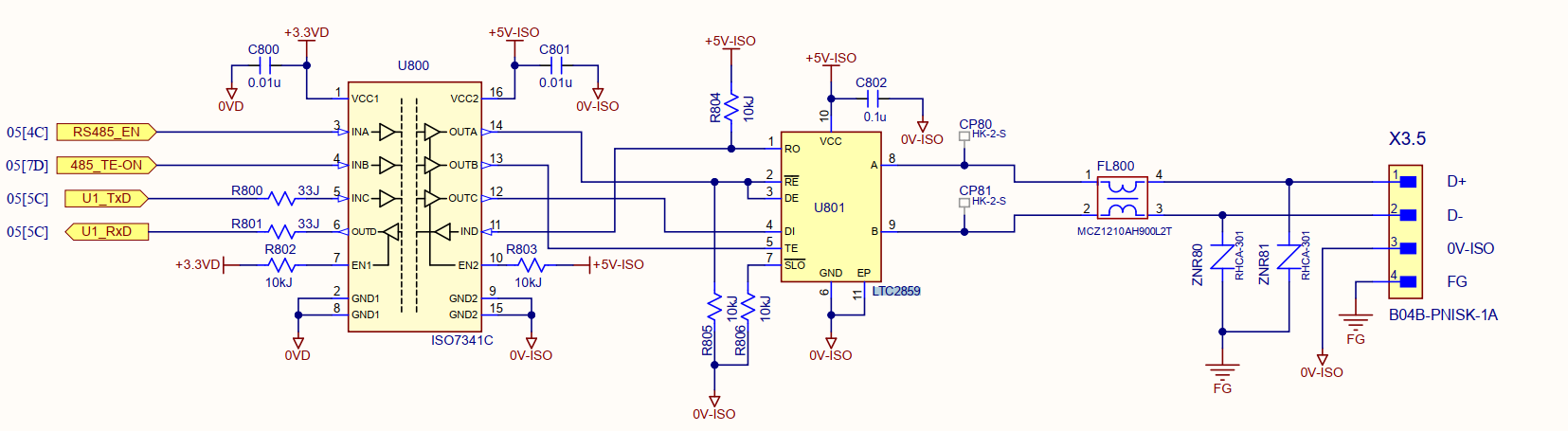
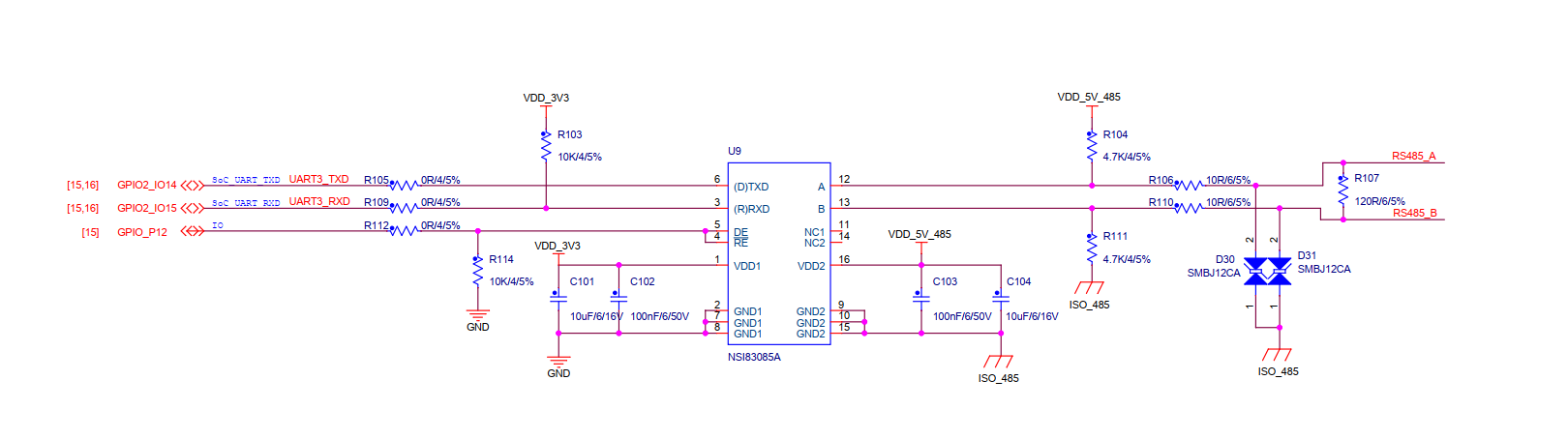
收发器
LTC2859设计参考
NSI83085A设计参考,SOC侧引脚:TXD、RXD、DE/RE(半双工接法),通信引脚:A、B
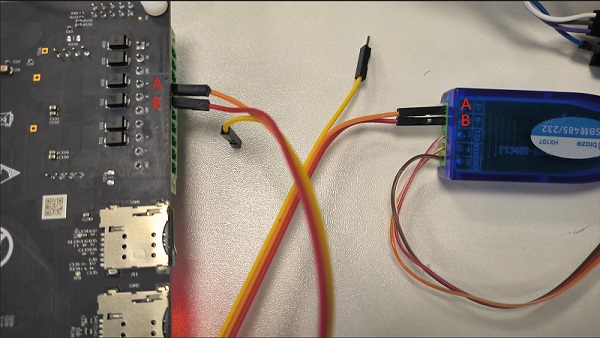
引脚接线
实际接法也很简单,只需接A和B两根线就可以了
操作
配置串口设备波特率:9600
1
| stty -F /dev/ttyLP2 9600 cs8 -parenb -cstopb raw -echo
|
使能引脚xxx,这个引脚编号对应485收发器的DE/RE引脚
1
2
| echo xxx > /sys/class/gpio/export
echo out > /sys/class/gpio/gpioxxx/direction
|
半双工工作模式切换:置高电平意味着给RS485发送数据,低电平意味着从RS485接收数据
1
2
| echo 1 > /sys/class/gpio/gpioxxx/value
echo 0 > /sys/class/gpio/gpioxxx/value
|
查看接收数据(接收模式)
发送数据(发送模式)
1
| while true; do echo "Hello RS485!\\r\\n" > /dev/ttyLP2; sleep 1; done;
|
编码
打开串口设备
1
2
3
4
5
6
|
int fd = open("/dev/ttyLP2", O_RDONLY);
if (fd == -1) {
printf("Unable to open dev!\n");
return -1;
}
|
配置参数:9600 8N1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
|
struct termios ts;
memset(&ts, 0, sizeof ts);
if(tcgetattr(fd, &ts) != 0) {
perror("Error from tcgetattr");
return -1;
}
cfsetispeed(&ts, B9600);
ts.c_cflag &= ~PARENB;
ts.c_cflag &= ~CSTOPB;
ts.c_cflag &= ~CSIZE;
ts.c_cflag |= CS8;
ts.c_cflag &= ~CRTSCTS;
ts.c_cflag |= CREAD | CLOCAL;
ts.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG);
ts.c_iflag &= ~(IXON | IXOFF | IXANY);
ts.c_oflag &= ~OPOST;
ts.c_cc[VMIN] = 0;
ts.c_cc[VTIME] = 5;
if (tcsetattr(fd, TCSANOW, &ts) != 0) {
perror("Error from tcsetattr");
return -1;
}
|
配置收发模式
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
| int configure_rs485_gpio(void) {
int fd;
fd = open("/sys/class/gpio/export", O_WRONLY);
if (fd == -1) {
perror("无法导出 GPIO");
return -1;
}
write(fd, "142", 3);
close(fd);
fd = open("/sys/class/gpio/gpio142/direction", O_WRONLY);
if (fd == -1) {
perror("无法设置 GPIO 方向");
return -1;
}
write(fd, "out", 3);
close(fd);
gpio_fd = open("/sys/class/gpio/gpio142/value", O_RDWR);
if (gpio_fd == -1) {
perror("无法打开 GPIO 值文件");
return -1;
}
set_rs485_receive_mode();
return 0;
}
void set_rs485_transmit_mode(void) {
if (gpio_fd != -1) {
lseek(gpio_fd, 0, SEEK_SET);
write(gpio_fd, "1", 1);
usleep(500);
}
}
void set_rs485_receive_mode(void) {
if (gpio_fd != -1) {
lseek(gpio_fd, 0, SEEK_SET);
write(gpio_fd, "0", 1);
usleep(500);
}
}
|
读取UART数据
1
2
3
4
5
6
7
8
9
10
11
12
13
14
|
set_rs485_receive_mode();
while(1) {
char buf[256];
int ret = read(fd, buf, sizeof(buf));
if (ret < 0) {
printf("Reading error!\n");
return -1;
}
buf[ret] = '\0';
printf("Receive %d bytes : %s\n", ret, buf);
sleep(1);
}
|